Cropping and harvesting robots

Description of the innovative solution
The use of robotics for cropping and harvesting in agriculture. This includes navigation and guidance, including transportation and autonomous tractors, transplantation and seedling systems, pruning and thinning, weed control and disease monitoring, harvesting, and traceability and geo-positioning. Mechanisation has been used for many decades in agriculture and has provided significant benefits for agricultural productivity. Recently, there have been considerable advances towards full automation of cropping and harvesting, which has the potential to increase agricultural productivity by...
The use of robotics for cropping and harvesting in agriculture. This includes navigation and guidance, including transportation and autonomous tractors, transplantation and seedling systems, pruning and thinning, weed control and disease monitoring, harvesting, and traceability and geo-positioning. Mechanisation has been used for many decades in agriculture and has provided significant benefits for agricultural productivity. Recently, there have been considerable advances towards full automation of cropping and harvesting, which has the potential to increase agricultural productivity by increasing efficiency, reliability and precision, and reducing the need for human intervention. For example, ‘soft grasp’ technology has recently developed to the point where it can be used to successfully harvest agricultural produce without damage. While full automation of agriculture activities is hampered by the dynamic and unstructured environment of field farming, automation in controlled environment farming is easier and is progressing more rapidly than automation in the field.
Examples and additional resources
Real-world examples
See this solution in action in different contexts and settings around the world
Root-AI robots for future farming
Additional resources
Learn more about this solution through studies, articles, business cases, and other information
Selective Harvesting Robots
Contacts
Connect to others working on and with this solution around the world
Pathways to uptake
Engage with our “backcasting tool” to imagine and design “pathways to uptake” for this solution in your setting.
This process involves defining a future vision of this solution being used in your context, and then working “backwards” to identify necessary steps to achieve this vision by 2030. Going through this exercise as an individual or with a team can help to clarify the WHAT/WHEN/HOW of moving a solution (or package of solutions) towards having major impact. We hope these pathways will inspire outside-of-the-box thinking, creative approaches, and actionable concrete steps to move ideas into action.
Pathway builder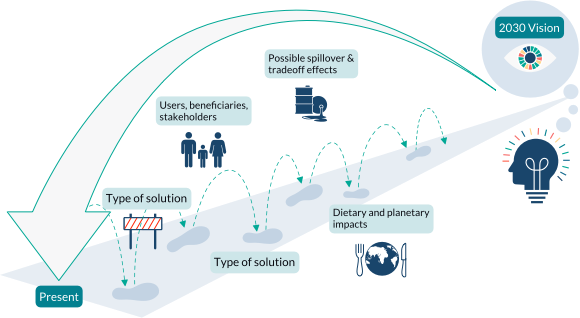
Explore pathways for this solution
Be the first one and add a pathway for this solution!